
無人機(Unmanned Aerial Vehicle),指的是一種由動力驅動的、無線遙控或自主飛行、機上無人駕駛并可重復使用的飛行器,飛機通過機載的計算機系統(tǒng)自動對飛行的平衡進行有效的控制,并通過預先設定或飛機自動生成的復雜航線進行飛行,并在飛行過程中自動執(zhí)行相關任務和異常處理。
本篇博客主要介紹多旋翼無人機系統(tǒng)基本組成
多旋翼無人機基本組成
機械系統(tǒng)
多旋翼無人機的機械系統(tǒng)主要包括
- 機身
- 機臂
- 起落架

多軸飛行器的機身結構多種多樣,根據(jù)可連接機臂數(shù)量區(qū)分可分為四軸、六軸、八軸。不同機臂數(shù)量各有各的優(yōu)勢,根據(jù)應用場合不同可靈活選擇,四軸飛行器的優(yōu)勢是航時長,結構簡單;六軸和八軸飛行器要比四軸飛行器航時低,但其飛行穩(wěn)定性相對四軸飛行器有所提高,六軸和八軸飛行器另外一個優(yōu)點是在飛行過程中其中一個機臂出現(xiàn)問題造成電機停轉后另外機臂依然可以控制飛行器保持平穩(wěn),這項冗余功能是四軸飛行器所不具備的。在行業(yè)應用要求高航時例如植保、電力巡線可采用四軸飛行器,在航拍、攝影等要求飛行器穩(wěn)定、安全可采用六軸飛行器。
四軸飛行器依據(jù)其機身布局結構可分為“十”型和“X”型。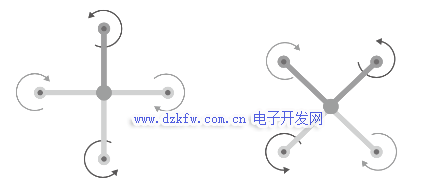
四軸飛行器,也可以同軸共槳,就是一個電機,有上下兩個槳,這樣可以使得飛行器的負載能力提高,但是弊端就是會降低飛行時間。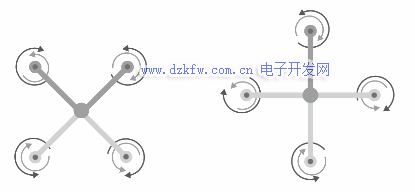
多旋翼飛行器機臂用于連接機身與電機,其連接件結構硬度要強,否則會造成機身振動增大飛控姿態(tài)解算誤差。起落架的作用是在無人機起飛和降落時起到緩沖的作用。
動力系統(tǒng)
旋翼無人機動力系統(tǒng)包括無刷電機、電子調(diào)速器、Li-Po電池、螺旋槳。
以四旋翼為例,動力系統(tǒng)的框圖如下圖所示,電池連接分電板,分電板連接電調(diào),電調(diào)連接電機,電機連接螺旋槳,構成一路的動力系統(tǒng),四旋翼則有四路。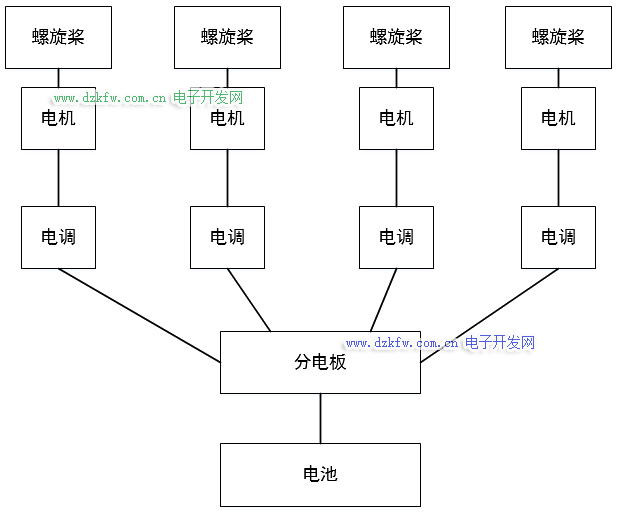
直流無刷電機

無刷電機是指無電刷和換向器(或集電環(huán))的電機,又稱無換向器電機,由主體和驅動器組成,是一種典型的機電一體化產(chǎn)品無刷電機具有工作效率高、調(diào)速范圍廣、可靠性高、穩(wěn)定性好及過載能力強等特點。
無刷電機有多種型號,基本參數(shù)有
- 直徑
- 高度
- KV值
根據(jù)應用飛機情況不同需選用相應參數(shù)的電機。
電機的直徑與高度與機臂上的電機托相關,KV值與無人機的軸距相關,電機的KV值與電機扭矩成反比,一般大軸距的飛機要配低KV值大尺寸的螺旋槳,來產(chǎn)生較高的拉力,小軸距的飛機要配高KV值小尺寸的螺旋槳,來調(diào)節(jié)更加精細。
例如:颶風牌U2810 KV750直流無刷電機
其中U2810代表電機直徑28mm,高度10mm,KV750表示電機在空載情況下,電機的輸入信號每增加1V,電機的轉速增加750rmp
電子調(diào)速器

直流無刷電子調(diào)速器(Electronic Speed Control,ESC),通常簡稱為電調(diào),功能為接收飛控端發(fā)出的PWM信號,驅動和調(diào)節(jié)直流無刷電機。
電調(diào)有四種保護功能:
- 啟動保護:如果當推油門動作執(zhí)行后,兩秒內(nèi),馬達未能正常啟動,此時電調(diào)將會自動關閉馬達,油門需再次拉到最低后,才可以重新啟動。
- 溫度保護:當電調(diào)工作溫度過高,超過110℃時,電調(diào)會自動降低輸出功率,但不會將輸出功率全部關閉,最多只降到全功率的40%,避免摔機。
- 假如發(fā)生遙控器油門信號持續(xù)丟失1秒,電調(diào)會自動檢測到該情況,并開始逐漸降低輸出功率,在降低期間信號依然未恢復,則會一直降低到零輸出。若在降低期間信號恢復,則立即恢復油門控制。
- 過負荷保護:當負載突然變很大時,電調(diào)會切斷動力,或自動重啟。
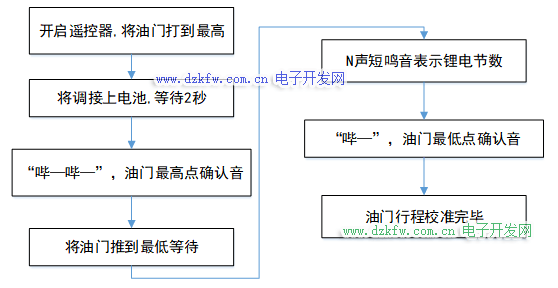
在首次使用無刷電子調(diào)速器時為了讓電調(diào)適應遙控器油門行程,需要進行油門行程校準。校準的流程如下:
Li-Po電池
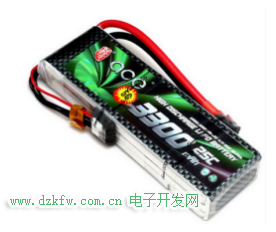
Li-Po電池為整個無人機系統(tǒng)提供能量來源,鋰聚合物電池相比傳統(tǒng)的鎳鎘電池具有性能高、體積小、質量輕、容量大、散熱快等特點在無人機領域得到了廣泛的使用。Li-Po電池單節(jié)電壓為3.7v,滿電電壓為4.2v。
螺旋槳

多旋翼無人機系統(tǒng)通過電機帶動螺旋槳旋轉,向下吹風產(chǎn)生向上推力,是無人機動力系統(tǒng)中不可或缺的一部分。
按材料分螺旋槳可分為:
- 碳纖維
- 木槳
- 注塑槳
木槳的材料多為櫸木,硬度高,重量輕,經(jīng)過風干打蠟上漆以后不怕受潮,在航空史上,木槳在早期扮演了非常重要的角色。碳纖維是一種與人造絲,合成纖維一樣的纖維狀碳材料。由于碳纖維的材料原因,它有優(yōu)異的硬度和合適的漿型,效率優(yōu)于木槳。以上兩種槳的價格都過高,對于一般使用者都選擇注塑槳。
螺旋槳的型號由如8045,1038等4位數(shù)字表示,分別代表槳葉兩個重要的參數(shù),槳直徑和槳螺距。槳直徑是指槳轉動所形成的圓的直徑,對于雙葉槳(兩片槳葉,這是最常用的槳)恰好是兩片槳葉長度之和,由前兩位數(shù)字表示,如上面的80和10,單位為英寸。槳螺距則代表槳旋轉一周前進的距離,由后兩位數(shù)字表示,如上面的45和38。槳直徑和螺距越大,槳能提供的拉(推)力越大
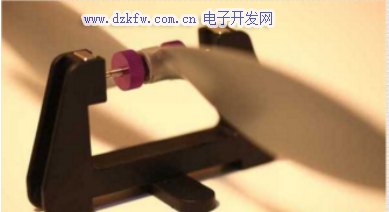
槳葉會隨著電機高速旋轉,所以其旋轉平衡是一個很重要的指標。如果槳葉有一頭重一頭輕,或者一側輕一側重等不平衡問題,那么在旋轉時就會產(chǎn)生左右/前后晃動等問題。這樣不僅僅動力效率低,而且還可能會損壞電機造成飛機炸機。一般的槳葉都已經(jīng)進行過自平衡測試,對于要求高的場合也可以自己調(diào)節(jié)槳葉的自平衡。下面是一種常見的測試自平衡的工具。
飛行控制系統(tǒng)
飛行控制系統(tǒng)(Flight control system),簡稱飛控,是無人機最重要的部分,相當于無人機的大腦。飛控一般由一塊或多塊MCU及各種傳感器組成。MCU處理相關傳感器的信息,經(jīng)過計算解算出飛機的當前姿態(tài),位置,狀態(tài)等信息,并根據(jù)接收到的來自遙控器或地面站的指令,輸出電機的控制信號,使電機轉速產(chǎn)生相應變化,改變飛機姿態(tài),達到期望任務。
現(xiàn)在市面上的飛行控制器分為兩種。一種是由商業(yè)公司設計生產(chǎn)的,例如DJI的Naze系列飛控,一般都是閉源的,并且經(jīng)過正規(guī)系統(tǒng)的測試,穩(wěn)定性方面有保障。另外一種就是由愛好者或者公司發(fā)起的開源飛控,這類飛控的硬件設計和軟件代碼一般都是開放的,如果有更多的人參與,能夠快速迭代改進。


最后上一個完整的無人機系統(tǒng)圖如下:
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底