
▀\äė┐žųŲŲõ▒Š┘|╩Ū┐žųŲļŖÖCŻ¼īŹ¼F(xi©żn)Ųõī”ĮŪ╬╗ęŲŻ¼▐DŠžŻ¼▐D╦┘Ą╚╬’└Ē┴┐ĪŻ ▀\äėūįäė╗»┐žųŲę╗░Ńßśī”─│éĆ«aŲĘŻ¼ė╔ÖCąĄĪó▄ø╝■ĪóļŖÜŌĄ╚─ŻēKĮM│╔Ż¼╚ńŠ½├▄öĄ(sh©┤)┐žÖCąĄĪóÖC┤▓ĪóÖCŲ„╚╦Īó¤o╚╦ÖCĪó▀\äėŲĮ┼_Ą╚Ą╚ĪŻ▀\äė┐žųŲų„ę¬ßśī”─│éĆ«aŲĘĄ─éĆ¾w┐žųŲŻ¼╦³┐╔ęį╩Ū─│éĆŽĄĮy(t©»ng)ā╚Ą──│éĆįOéõĪŻ
▀^│╠┐žųŲ┼c▀\äė┐žųŲį┌║▄ČÓł÷║ŽęčĮø(j©®ng)ĮY║Žį┌ę╗Ų╣▓═¼┐žųŲ┤¾ą═╔·«aŠĆĪŻ
╩▓├┤╩Ūūįäė╗»▀^│╠┐žųŲŻ┐
└¹ė├plc┐žųŲŲ„╩š╝»é„ĖąŲ„Ę┤üĄ─öĄ(sh©┤)ō■(j©┤)Ż¼▓óĘų╬÷╠Ä└Ē▀@ą®öĄ(sh©┤)ō■(j©┤)║¾Ż¼š{╣Ø(ji©”)ā×(y©Łu)╗»╝░┐žųŲĖ„ĘNįOéõŻ¼ęį╠ßĖ▀╔·«aĄ─ą¦┬╩ĪŻŲõ┐žųŲĄ─ī”Ž¾ę╗░Ń╩ŪĖ„ŅÉ╦«▒├Īó’LÖCĪóļŖäėķyķTĄ╚ĪŻ
▀^│╠ūįäė╗»ę╗░Ńė├ė┌Łh(hu©ón)▒ŻąąśI(y©©)╚ń╬█╦«ĪóÅUÜŌ╠Ä└ĒŻ¼╣Ø(ji©”)─▄ąąśI(y©©)Ż¼ī”╣żśI(y©©)╔·«aųąĄ─Ė„ŅÉžō▌dįOéõ▀MąąųŪ─▄š{╣Ø(ji©”)ęį▒ŻūCŲõ▀\ąąė┌ūŅ╝čĀŅæB(t©żi)Ż¼ęį▀_ĄĮ╣Ø(ji©”)─▄Ą──┐Ą─ĪŻ
š¹éĆŽĄĮy(t©»ng)ę╗░Ńė╔plc┐žųŲ╣±Īó┼õļŖ╣±ęį╝░┐žųŲ│╠ą“Ż¼Ė„é„ŅÉĖąŲ„Ż¼ĮMæB(t©żi)▄ø╝■Ż¼▒O(ji©Īn)┐žŽĄĮy(t©»ng)Ą╚ĮM│╔ĪŻ
▀^│╠┐žųŲų„ę¬ė├ė┌é„Įy(t©»ng)╣żśI(y©©)ūįäė╗»ŅIė“ųąŻ¼╩Ūę╗ĘN┤¾ŽĄĮy(t©»ng)┐žųŲŻ¼┐žųŲī”Ž¾▒╚▌^ČÓŻ¼╚ńę╗Śl╔·«aŠĆĪŻ

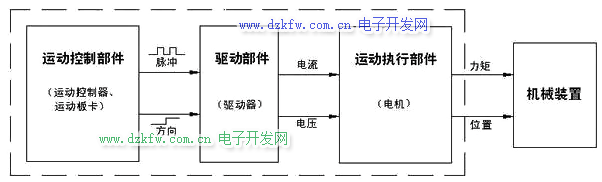
Ī°─│Ų¾śI(y©©)Ą─ūįäė╗»▀^│╠┐žųŲ═žōõłD
ūįäė╗»▀^│╠┐žųŲ║═▀\äė┐žųŲ╩Ū▓╗═¼Ą─
Å─ĻPūó³cüĒšfŻ¼ūįäė╗»▀^│╠┐žųŲ(▀@ā║ųĖ╦┼Ę■ļŖÖC)╩ūę¬ĻPūóĄ─╩Ū┐žųŲå╬éĆļŖÖCĄ─▐DŠÓĪó╦┘Č╚ĪóĘĮ╬╗ųąĄ─ę╗éĆ╗“ČÓéĆģóöĄ(sh©┤)ĄĮ▀_ĮoČ©ųĄĪŻČ°▀\äė┐žųŲ╩ūę¬ĻPūó³cį┌ė┌║═ųCČÓéĆļŖÖCŻ¼═ĻĮYųĖČ©Ą─▀\äė(ĮM│╔▄ēĄ└ĪóĮM│╔╦┘Č╚)Ż¼▒╚▌^ų°ųž▄ēĄ└ęÄ(gu©®)äØĪó╦┘Č╚ęÄ(gu©®)äØĪó▀\äėīW▐D╗»;▒╚ĘĮöĄ(sh©┤)┐žÖC┤▓└’├µę¬║═ųCXYZ▌SļŖÖCŻ¼═ĻĮY▓Õčaäėū„ĪŻ
ūįäė╗»▀^│╠┐žųŲ│Ż│Żū„×ķ▀\äė┐žųŲŽĄĮy(t©»ng)Ą─ę╗éĆŁh(hu©ón)╣Ø(ji©”)(ę╗░Ń╩ŪļŖ┴„Łh(hu©ón)Ż¼ū„śI(y©©)į┌┴”ŠžĘĮ╩ĮŽ┬)Ż¼Ė³ų°ųžė┌ī”ļŖÖCĄ─┐žųŲŻ¼ę╗░Ń░³└©ĘĮ╬╗┐žųŲĪó╦┘Č╚┐žųŲĪó▐DŠž┐žųŲ╚²éĆ┐žųŲŁh(hu©ón)Ż¼ę╗░Ńø]ėąęÄ(gu©®)äØĄ─▓┼─▄(ėą▓┐Ęų“īäėŲ„ėą║åå╬Ą─ĘĮ╬╗║═╦┘Č╚ęÄ(gu©®)äØ▓┼─▄)ĪŻ

Ī°▀\äė┐žųŲŽĄĮy(t©»ng)łD
Īż ▀\äė┐žųŲŲ„Ż║│ŻęŖĄ─Š═╩ŪPLC
Īż “īäėŲ„Ż║╣ż┐ž╚╦ī”“īäėŲ„æ¬įōį┘╩ņŽż▓╗▀^┴╦
Īż ł╠(zh©¬)ąąÖCśŗŻ║╦┼Ę■ļŖÖC
Īż £p╦┘ÖCśŗŻ║£p╦┘Ų„
Īż ╣Ō¢┼Ż║ŠÄ┤aŲ„Ą─ę╗ĘNŻ╗(ę╗░Ńė├ė┌▄ć┤▓╝ė╣ż)
Īż ╚╦ÖCĮń├µŻ║┤¾╝ę╩ņŽżĄ─ė|├■Ų┴ĪŻ
▀\äė┐žųŲŽĄĮy(t©»ng)Ųõ▒Š┘|╩Ū┐žųŲļŖÖCŻ¼īŹ¼F(xi©żn)Ųõī”ĮŪ╬╗ęŲŻ¼▐DŠžŻ¼▐D╦┘Ą╚╬’└Ē┴┐ĪŻę╗░Ńßśī”─│éĆ«aŲĘŻ¼ė╔ÖCąĄĪó▄ø╝■ĪóļŖÜŌĄ╚─ŻēKĮM│╔Ż¼╚ńŠ½├▄öĄ(sh©┤)┐žÖCąĄĪóÖC┤▓ĪóÖCŲ„╚╦Īó¤o╚╦ÖCĪó▀\äėŲĮ┼_Ą╚Ą╚ĪŻ▀\äė┐žųŲų„ę¬ßśī”─│éĆ«aŲĘĄ─éĆ¾w┐žųŲŻ¼╦³┐╔ęį╩Ū─│éĆŽĄĮy(t©»ng)ā╚Ą──│éĆįOéõĪŻ
║åå╬üĒšfŻ¼Š═╩Ūė╔▀\äė┐žųŲŲ„░l(f©Ī)│÷├³┴ŅŻ¼Įo“īäėÖCśŗ▀Mąą╣”┬╩Ę┼┤¾Ż¼īóĘ┼┤¾║¾Ą─ą┼╠¢é„Įoł╠(zh©¬)ąąÖCśŗ(╦┼Ę■ļŖÖC)Ż¼╦┼Ę■ļŖÖCūįĦŠÄ┤aŲ„Ż¼─▄ē“īŹ¼F(xi©żn)░ļķ]Łh(hu©ón)┐žųŲŻ╗╦┼Ę■ļŖÖCė├é„äėÖCśŗ┐žųŲÖCąĄŻ¼į┌ÖCąĄčbų├╔Ž░▓čb┴╦╣Ō¢┼│▀(ę▓╩ŪŠÄ┤aŲ„)Ż¼īŹ¼F(xi©żn)╚½ķ]Łh(hu©ón)┐žųŲĪŻ▓┘ū„╚╦åTį┌¼F(xi©żn)ł÷┐╔═©▀^╚╦ÖCĮń├µ╚ź▀Mąąš¹éĆŁh(hu©ón)╣Ø(ji©”)Ą─š{įć▓┘ū„ĪŻ
▀\äė┐žųŲŲį┤ė┌įńŲ┌Ą─╦┼Ę■┐žųŲĪŻ║åå╬ĄžšfŻ¼▀\äė┐žųŲŠ═╩Ūī”ÖCąĄ▀\äė▓┐╝■Ą─╬╗ų├Īó╦┘Č╚Ą╚▀MąąīŹĢrĄ─┐žųŲ╣▄└ĒŻ¼╩╣Ųõ░┤ššŅAŲ┌Ą─▀\äė▄ē█E║═ęÄ(gu©®)Č©Ą─▀\äėģóöĄ(sh©┤)▀Mąą▀\äėĪŻ
įńŲ┌Ą─▀\äė┐žųŲ╝╝ągų„ę¬╩Ū░ķļSų°öĄ(sh©┤)┐ž╝╝ągĪóÖCŲ„╚╦╝╝ąg║═╣żÅSūįäė╗»╝╝ągĄ─░l(f©Ī)š╣Č°░l(f©Ī)š╣Ą─ĪŻįńŲ┌Ą─▀\äė┐žųŲŲ„īŹļH╔Ž╩Ū┐╔ęį¬Ü┴ó▀\ąąĄ─īŻė├Ą─┐žųŲŲ„Ż¼═∙═∙¤oąĶ┴Ē═ŌĄ─╠Ä└ĒŲ„║═▓┘ū„ŽĄĮy(t©»ng)ų¦│ųŻ¼┐╔ęį¬Ü┴ó═Ļ│╔▀\äė┐žųŲ╣”─▄Īó╣ż╦ć╝╝ągę¬Ū¾Ą─Ųõ╦¹╣”─▄║═╚╦ÖCĮ╗╗ź╣”─▄ĪŻ
▀@ŅÉ┐žųŲŲ„┐╔ęį│╔×ķ¬Ü┴ó▀\ąąĄ─▀\äė┐žųŲŲ„ĪŻ▀@ŅÉ┐žųŲŲ„ų„ę¬ßśī”īŻķTĄ─öĄ(sh©┤)┐žÖCąĄ║═Ųõ╦¹ūįäė╗»įOéõČ°įOėŗŻ¼═∙═∙ęčĖ∙ō■(j©┤)æ¬ė├ąąśI(y©©)Ą─╣ż╦ćę¬Ū¾įOėŗ┴╦ŽÓĻPĄ─╣”─▄Ż¼ė├æ¶ų╗ąĶę¬░┤ššŲõģf(xi©”)ūhę¬Ū¾ŠÄīææ¬ė├╝ė╣ż┤·┤a╬─╝■Ż¼└¹ė├RS232╗“š▀DNCĘĮ╩Įé„▌ö?sh©┤)Į┐žųŲŲ„Ż¼┐žųŲŲ„╝┤┐╔═Ļ│╔ŽÓĻPĄ─äėū„ĪŻ▀@ŅÉ┐žųŲŲ„═∙═∙▓╗─▄ļxķ_Ųõ╠žČ©Ą─╣ż╦ćę¬Ū¾Č°┐ńąąśI(y©©)æ¬ė├Ż¼┐žųŲŲ„Ą─ķ_Ę┼ąįāHāHę└┘ćė┌┐žųŲŲ„Ą─╝ė╣ż┤·┤aģf(xi©”)ūhŻ¼ė├æ¶▓╗─▄Ė∙ō■(j©┤)æ¬ė├ę¬Ū¾Č°ųžĮMūį╝║Ą─▀\äė┐žųŲŽĄĮy(t©»ng)ĪŻ
ę╗éĆ▀\äė┐žųŲŽĄĮy(t©»ng)Ą─Ė∙▒Š╝▄śŗĮM│╔░³└©
ę╗éĆ▀\äė┐žųŲŽĄĮy(t©»ng)Ż¼═©│Żė╔“īäėŲ„Īó┐žųŲŲ„Īóé„ĖąŲ„╚²▓┐ĘųĮM│╔ĪŻ
1Īó┐žųŲŲ„Ż║
1Ż®PLC
PLCų„ę¬╣”─▄╩Ūī”ķ_ĻP┴┐▀Mąą▀ē▌ŗ┐žųŲŻ¼▓óėą║åå╬Ą─▀\äė┐žųŲ(ų▒ŠĆ▄ē█E┐žųŲ)Īó▀\╦ŃöĄ(sh©┤)ō■(j©┤)╠Ä└ĒĄ╚╣”─▄Ż¼═©│Ż▓╔ė├ė|├■Ų┴ū„╚╦ÖCĮń├µĪŻ×ķöU│õŲõæ¬ė├ŅIė“Ż¼Ė„ÅS╝ę×ķ┐═æ¶╠ß╣®┴╦Ė„ĘN▀x┼õ╣”─▄─ŻēKŻ¼╚ńČÓ▌S▀\äė┐žųŲ─ŻēKĪóŠW(w©Żng)Įj═©ą┼─ŻēKĪó─ŻöMą┼╠¢┼cöĄ(sh©┤)ūųą┼╠¢▐DōQ─ŻēKĄ╚ĪŻPLCŠ▀ėą╣żū„┐╔┐┐ĪóŠÄ│╠║åå╬Ą╚ā×(y©Łu)³cŻ¼Ą½Ųõ▀\äė┐žųŲ╣”─▄ŽÓī”║åå╬Ż¼╚¶▀xė├ČÓ▌S▀\äė┐žųŲ─ŻēKŻ¼ätārĖ±▌^Ė▀ĪŻ
2Ż®¬Ü┴ó╩Į▀\äė┐žųŲŲ„
¬Ü┴ó╩Į▀\äė┐žųŲŲ„┼õėą’@╩ŠŲ┴Īó░┤µI║═╣”─▄═Ļ╔ŲĄ─┐žųŲųĖ┴ŅŻ¼▓óėąĖ„ĘN═©ą┼Įė┐┌Ż¼┐žųŲļŖäėÖC▀\äėĄ──▄┴”▒╚PLCÅŖ┤¾ĪŻ┐╔═Ļ│╔ų▒ŠĆ▓ÕčaĪółA╗Ī▓ÕčaĪó▄ē█E┐žųŲĄ╚╣”─▄Ż¼ŪęŠÄ│╠║åå╬ĪŻ─┐Ū░Ż¼ć°═ŌĄ─▀\äė┐žųŲŲ„Č╝Š▀ėą¼F(xi©żn)ł÷┐éŠĆ┐žųŲ╣”─▄ĪŻ
3Ż®PCI┐éŠĆą═▀\äė┐žųŲ┐©
ė╔ė┌PCÖC▀\╦Ń╦┘Č╚┐ņĪó┤µā”┴┐┤¾Ż¼Č°ŪęWindows▓┘ū„ŽĄĮy(t©»ng)Ą─▄ø╝■┘Yį┤žSĖ╗Ż¼▓╔ė├VBĪóVCĄ╚▄ø╝■ŠÄīæė├æ¶│╠ą“,╣”─▄╩«ĘųÅŖ┤¾ĪŻ║▄ČÓūįäė╗»įOéõČ╝ļx▓╗ķ_PCÖCŻ¼╠žäe╩Ū▓╔ė├ÖCŲ„ęĢėXÖz£yĄ─ūįäė╗»įOéõĪóąĶę¬▀\ąąAuoCADĄ╚┤¾ą═▄ø╝■Ą─įOéõ║═ąĶę¬▓╔╝»┤µā”╔·«aöĄ(sh©┤)ō■(j©┤)Ą─įOéõĄ╚Ż¼ę“┤╦Ż¼▀@ą®įOéõ▓╔ė├╗∙ė┌PCÖCĄ─PCI┐éŠĆą═▀\äė┐žųŲ┐©┼cPCÖCę╗ŲĮM│╔▀\äė┐žųŲŲ„ĪŻį┌╦∙ėąĄ─▀\äė┐žųŲŲ„ųąŻ¼▀\äė┐žųŲ┐©Ą─╣”─▄ūŅÅŖŻ¼Ą½Ųõ╣żū„Ą─ĘĆ(w©¦n)Č©ąį┐╔┐┐ąį▌^▓ŅĪŻ
4Ż®īŻė├▀\äė┐žųŲŲ„
īŻė├▀\äė┐žųŲŲ„╩Ūßśī”╠žČ©Ą─įOéõīŻķTįOėŗĄ─▀\äė┐žųŲŲ„Ż¼╚ń└C╗©ÖC┐žųŲŲ„Īó┐p╝xÖC┐žųŲŲ„ćŖ└LÖC┐žųŲŲ„Ą╚ĪŻīŻė├▀\äė┐žųŲŲ„═©│Żęįå╬Ų¼ÖCĪóARMĄ╚ąŠŲ¼×ķ║╦ą─įOėŗŻ¼Ųõ╝»│╔Č╚Ė▀ĪóārĖ±▒Ńę╦Īó╩╣ė├ĘĮ▒ŃŻ¼▄ø╝■╩Ū×ķīŻė├įOéõ╠ž╩ŌįOėŗĄ─Ż¼┐═æ¶┐╔ų▒Įė╩╣ė├ĪŻŲõė▓╝■Īó▄ø╝■Ą─įOėŗČ╝│õĘų┐╝æ]┴╦īŻė├įOéõĄ─╣ż╦ćę¬Ū¾ĪŻ
ŽÓī”ė┌īŻė├▀\äė┐žųŲŲ„Č°čį,PLCĪó¬Ü┴ó╩Į▀\äė┐žųŲŲ„Īó▀\äė┐žųŲ┐©▒╗ĘQ×ķ═©ė├▀\äė┐žųŲŲ„ĪŻ
2Īó“īäėŲ„Ż║
ū„×ķ▀\äė┐žųŲųąĄ─ł╠(zh©¬)ąą▓┐╝■ę╗░ŃėąļŖäė╩ĮĪó ę║ē║╩Į╝░ÜŌäė╩Į╚²ŅÉĪŻ
ļŖäė╩Įł╠(zh©¬)ąą▓┐╝■äėū„ņ`├¶Ż¼ąį─▄ā×(y©Łu)┴╝Ż¼┐žųŲĘĮ▒ŃŻ¼Ūę╚▌ęūąĪą═╗»Ż¼ęčĮø(j©®ng)Ą├ĄĮÅVĘ║Ą─æ¬ė├ĪŻ▀\äė┐žųŲųąūŅ│Żė├Ą─╦┼Ę■ļŖÖCŅÉą═ėą:ų▒┴„(DC)╦┼Ę■ļŖÖCĪó¤o╦óų▒┴„╦┼Ę■ļŖÖCĪóĮ╗┴„(AC)╦┼Ę■ļŖÖC║═▓Į▀MļŖÖCĪŻ░┤ł╠(zh©¬)ąąļŖÖC╣”┬╩Ą─▓╗═¼Ż¼╦┼Ę■ļŖÖC┐╔Ęų×ķ:ąĪ╣”┬╩ļSäėŽĄĮy(t©»ng)(100WęįŽ┬)Īóųą╣”┬╩ļSäėŽĄĮy(t©»ng)(100~ -500 W)║═┤¾╣”┬╩ļSäėŽĄĮy(t©»ng)(500Węį╔Ž)ĪŻ
├┐ĘNļŖÖCČ╝ėąŽÓæ¬Ą─╠ž³c║═“īäėĘĮ╩ĮŻ¼įöęŖįŻ╚ńŻ║ÖCŲ„╚╦│Żė├ļŖÖCĮķĮBĪŻ
3Īóé„ĖąŲ„Ż║
ŠÄ┤aŲ„Īó┴”é„ĖąŲ„Īóē║┴”é„ĖąŲ„Ą╚ĪŻ
╚ń║╬▀xō±▀\äė┐žųŲŲ„Ż┐
1ĪóĖ∙ō■(j©┤)ę¬ķ_░l(f©Ī)įOéõĄ─╣żū„╠ž³cŻ¼┤_Č©╦┼Ę■ļŖÖCĄ─ŅÉą═Ż╗
2Īó┤_Č©ę¬┐žųŲĄ─ļŖÖC▌SöĄ(sh©┤)║═ļŖÖC╣żū„─Ż╩ĮŻ╗
3Īó┤_Č©╬╗ų├Öz£yĪóĘ┤ü─Ż╩ĮŻ¼▀xō±╩Ūʱ▓╔ė├╣ŌļŖŠÄ┤aŲ„╗“╣Ō¢┼│▀╗“┤┼¢┼│▀Ż╗
4Īó┤_Č©▌ö╚ļ▌ö│÷ķ_ĻP┴┐Ą─öĄ(sh©┤)┴┐Ż╗
5ĪóĖ∙ō■(j©┤)ęį╔Žā╚╚▌Ż¼▀xō±║Ž▀mĄ─▀\äė┐žųŲŲ„ĪŻ
▀\äė┐žųŲ┐© ų¬├¹ŲĘ┼Ų
ć°ā╚Ż║1.╣╠Ė▀
2.└ū┘É
3.š²▀\äė
4.▒Ŗ×ķ┼d
5.čą╚A
6.śĘäō(chu©żng)
7.¢|▌Ė▓®┼╔ųŪ─▄┐Ų╝╝
ć°═Ō
1.PMACŻ©ÜW─Ę²ł╩š┘ÅŻ®
2.┤õÜW Ż©ėóć°Ż®
3.Aerotech Ż©├└ć°Ż®
4.ęį╔½┴ąACS╣½╦Š
5.├└ć°ParkerHannifin╣½╦Š
6.├└ć°GALIL╣½╦Š
7.├└ć°┐ŲĀ¢─”Ė∙Ż©KollmorgenŻ®╣½╦Š
8.╚╩┐╚ųZ╝»łF
9.├└ć°Baldor╣½╦Š
10.├└ć°AEROTECH╣½╦Š
11.├└ć°ć°╝ęāxŲ„╣½╦ŠNI
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū